
自主学习从问题开始
■什么是压杆?工程结构中哪些构件属于压杆?压杆的稳定性设计有什么特别重要的意义?
工程结构中的压杆(柱)
主要承受轴向压缩载荷的杆件,称为压杆(土木工程中称为柱)。压杆是桥梁结构、建筑物结构以及各种机械结构中常见的构件、零件或部件。
下图中所示之汽车吊车中,大臂的举起靠液压推动液压杆实现的。起吊重物时,液压杆将承受很大的轴向压缩载荷。当压缩载荷小于一定数值时,液压杆将会保持直线平衡状态,这时可以保证吊车正常工作;当压缩载荷大于一定数值时,液压杆将会在外界微小的扰动下,突然从直线平衡状态转变为弯曲的平衡状态,从而导致吊车丧失正常工作能力——失效。自动翻斗汽车中的压杆也有类似的问题。


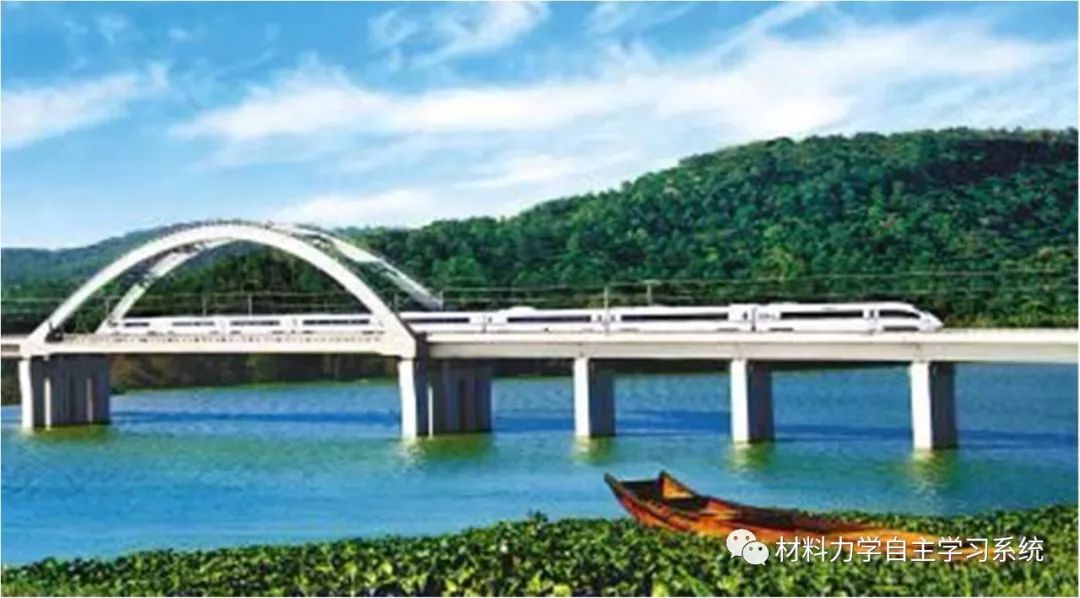
桥梁的桁架结构中既有拉杆也有压杆,拉杆主要是强度问题,压杆则既有强度问题也有稳定性问题。细长压杆则主要是稳定性问题,如:加拿大魁北克大桥由三跨钢桁架梁组成,主跨549米,建造历经30年,施工期间两次发生垮塌事故:第一次在1907年8月29日由于桁架中的压杆失稳,导致垮塌,75人丧生;第二次是中跨合龙时起吊设备局部构件断裂,13人丧生。

下图中所示是重新建造后、现在依然运行的魁北克桥。为了减轻运行压力,在不远处又修建了一座与之平行的悬索公路桥。

在建筑物中承受轴向压缩载荷的细长柱体(下图a、b),在设计中也要考虑稳定性问题。此外,高架的高速铁路的桥墩柱同样需要考虑稳定性问题(图c)。

(a)

(b)
(c)
■ 什么是稳定性?稳定性分析与稳定性设计与强度、刚度分析与设计有哪些区别?
为了回答这一问题,需要从稳定性的基本概念开始。
关于稳定性的基本概念
■ 刚体平衡稳定性的概念
所谓稳定性,是指物体平衡的性质。刚体和弹性体的平衡都有稳定和不稳定问题。
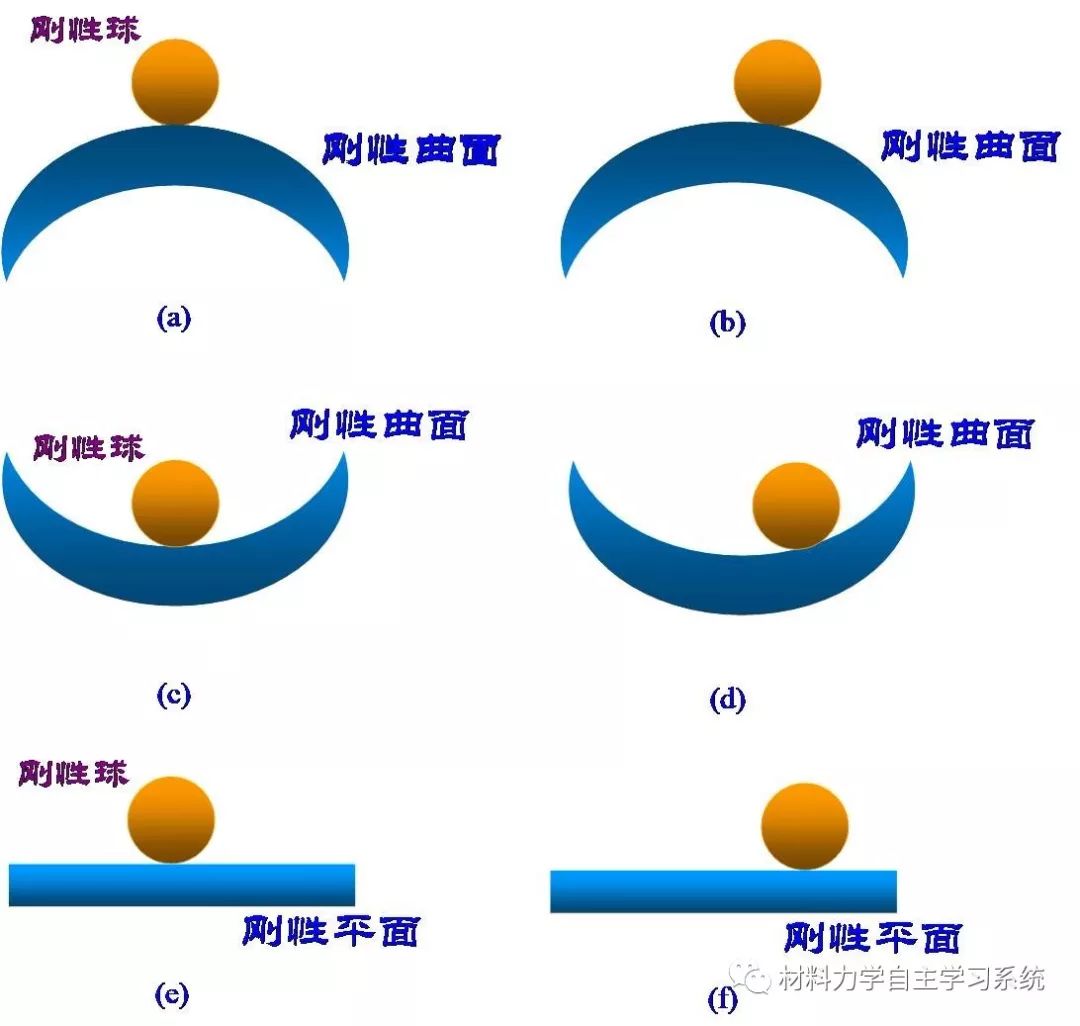
上图a所示之光滑刚性凸面上的刚性球,在重力与凸面约束力的作用下处于平衡状态。刚性球在微小扰动下偏离初始平衡位置(图b),扰动除去后,刚性球再也不能回到初始平衡位置。因此称这种情形下的初始平衡位置的平衡是不稳定的。对于图c所示之光滑刚性凹面上的刚性球,在重力与凹面约束力的作用下保持平衡。刚性球在微小扰动下偏离初始平衡位置(图d),扰动除去后,刚性球能够回到初始平衡位置。因此称这种情形下初始平衡位置的平衡是稳定的。对于图e所示之光滑刚性平面上的刚性球,在重力与平面约束力的作用下保持平衡。刚性球在微小扰动下偏离初始平衡位置,在任何新的位置都保持平衡(图f)。因此称这种情形下的平衡是随遇的。
压杆的平衡构形、平衡路径及其分叉
结构构件、机器的零件或部件在压缩载荷或其他特定载荷作用下,在某一位置保持平衡,这一平衡位置称为平衡构形(equilibrium configuration)或平衡状态。
轴向受压的理想细长直杆(下图a),当轴向压力FP小于一定数值时,压杆只有直线一种平衡构形。若以Δ表示压杆在弯曲时跨中截面的侧向位移,则在FP-Δ坐标系中,当压力FP小于某一数值时,FP-Δ关系由竖直线OB所描述,如图b所示。
当压力超过一定数值时,压杆仍可能具有直线的平衡构形,但在外界扰动下(例如施加微小的侧向力),使其偏离直线构形,转变为弯曲的平衡构形,扰动除去后,不能再回到原来的直线平衡构形,而在某一弯曲构形下达到新的平衡。这表明,当压力大于一定数值时,压杆存在两种可能的平衡构形——直线的和弯曲的。前者侧向位移Δ=0,后者Δ≠0。精确的非线性理论分析结果表明,在 FP-Δ坐标系中,上述两种平衡构形分别由竖直线BD(图b中的虚线)和曲线BC(图b中实曲线)所表示。不同压缩载荷下的FP-Δ曲线称为压杆的平衡路径(equilibrium path)。
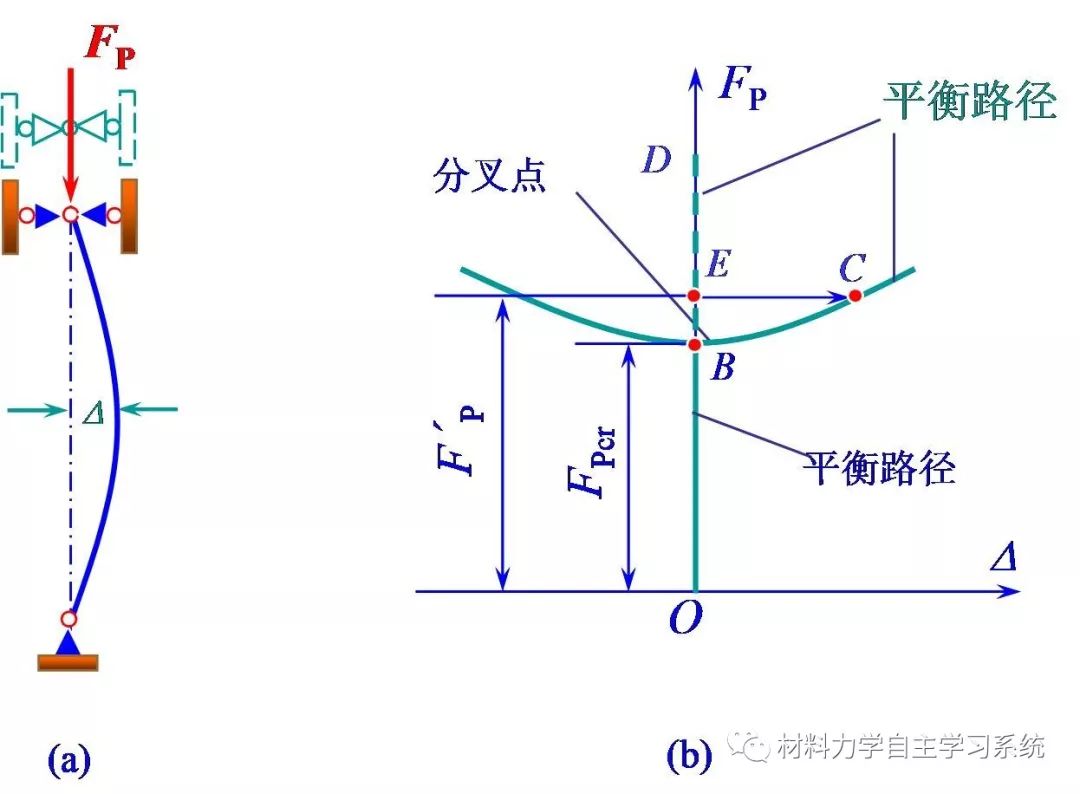
可以看出,当压力小于某一数值时,平衡路径OB是唯一的,它对应着直线的平衡构形。当压力大于某一数值时,其平衡路径出现分支BD和BC。其中一个分支BD对应着直线的平衡构形;另一个分支BC对应着弯曲的平衡构形。前者是不稳定的;后者是稳定的。这种出现分支平衡路径的现象称为平衡构形分叉(bifurcation of equilibriumconfiguration)或平衡路径分叉(bifurcation of equilibrium path)。
判别弹性平衡稳定性的静力学准则
当压缩载荷小于一定的数值时,微小外界扰动(disturbance)使压杆偏离直线平衡构形;外界扰动除去后,压杆仍能回复到直线平衡构形,则称直线平衡构形是稳定的(stable);当压缩载荷大于一定的数值时,外界扰动使压杆偏离直线平衡构形,扰动除去后,压杆不能回复到直线平衡构形,则称直线平衡构形是不稳定的(unstable)。此即判别压杆平衡稳定性的静力学准则(staticalcriterion for elastic stability)。
当压缩载荷大于一定的数值时,在任意微小的外界扰动下,压杆都要由直线的平衡构形转变为弯曲的平衡构形,这一过程称为屈曲(buckling)或失稳(loststability)。对于细长压杆,由于屈曲过程中出现平衡路径的分叉,所以又称为分叉屈曲(bifurcation buckling)。
稳定的平衡构形与不稳定的平衡构形之间的分界点称为临界点(critical point)。对于细长压杆,因为从临界点开始,平衡路径出现分叉,故又称为分叉点。临界点所对应的载荷称为临界载荷(critical load)或分叉载荷(bifurcationload),用FPcr表示。
很多情形下,屈曲将导致构件失效,这种失效称为屈曲失效(failure by buckling)。由于屈曲失效往往具有突发性,常常会产生灾难性后果,因此工程设计中需要认真加以考虑。
细长压杆临界点的平衡稳定性及其实验验证
■ 细长压杆临界点的平衡是稳定的
线性理论认为,细长压杆在临界点以及临界点以后的平衡路径都是随遇的,即:载荷不增加,屈曲位移不断增加。这表明,此时压杆完全丧失承载能力。
精确的非线性理论(例如大挠度理论和初始后屈曲理论)分析结果表明,细长压杆在临界点以及临界点以后的平衡路径都是稳定的。这表明,当细长压杆所承受的轴向压缩载荷达到或超过临界载荷时,压杆仍然具有承载能力。
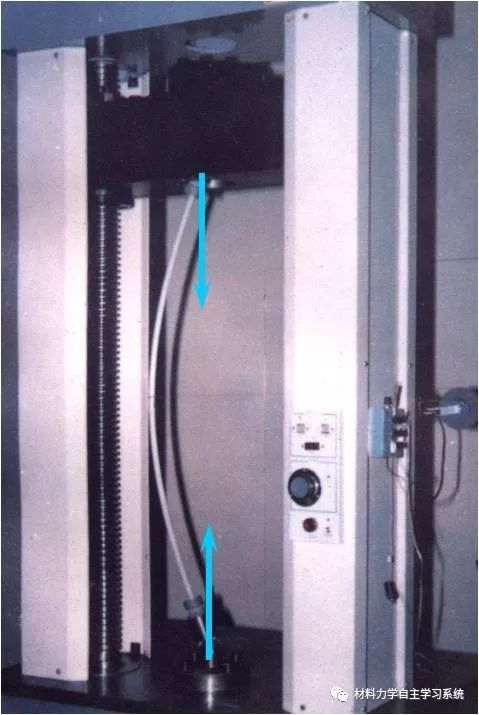
著者于20世纪90年代初所作的细长压杆稳定性实验结果证明了非线性分析所得到的结论,如下图所示。
■ 细长压杆的弹性稳定性实验的试样与加载与位移测量装置
实验所用试样为环氧树脂基体、纤维增强复合材料圆形截面压杆。直径有18mm、24mm两种规格,长度有2 773mm、2896mm等规格。下图a所示为d=18mm、l=2 773mm的试样。
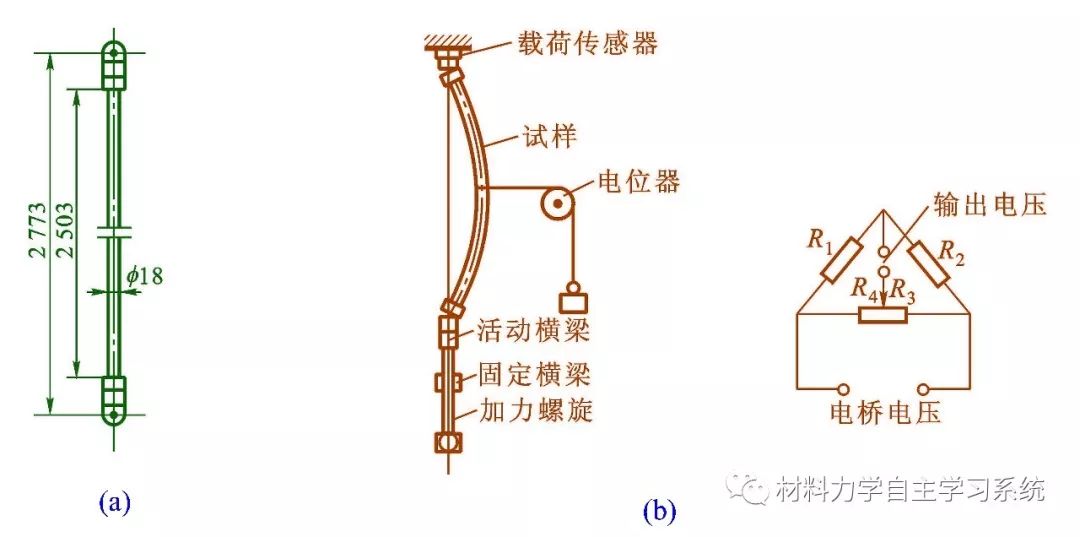
由于试样很长,一般材料试验机的试验空间很难满足实验要求,故需采用专门的加载装置。图b所示为加载与测量装置示意图;图c所示为d=18mm、l=2 773mm的大柔度压杆的实验照片。
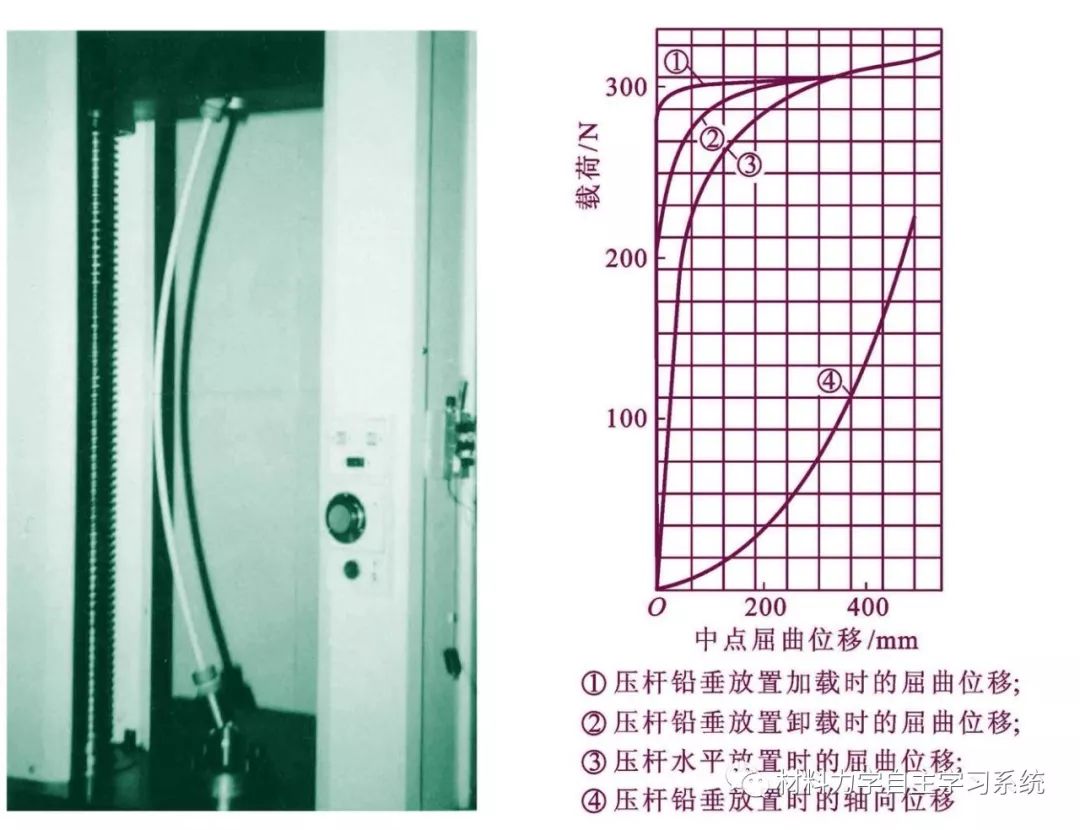
(c)
■ 试验结果与非线性理论结果的比较
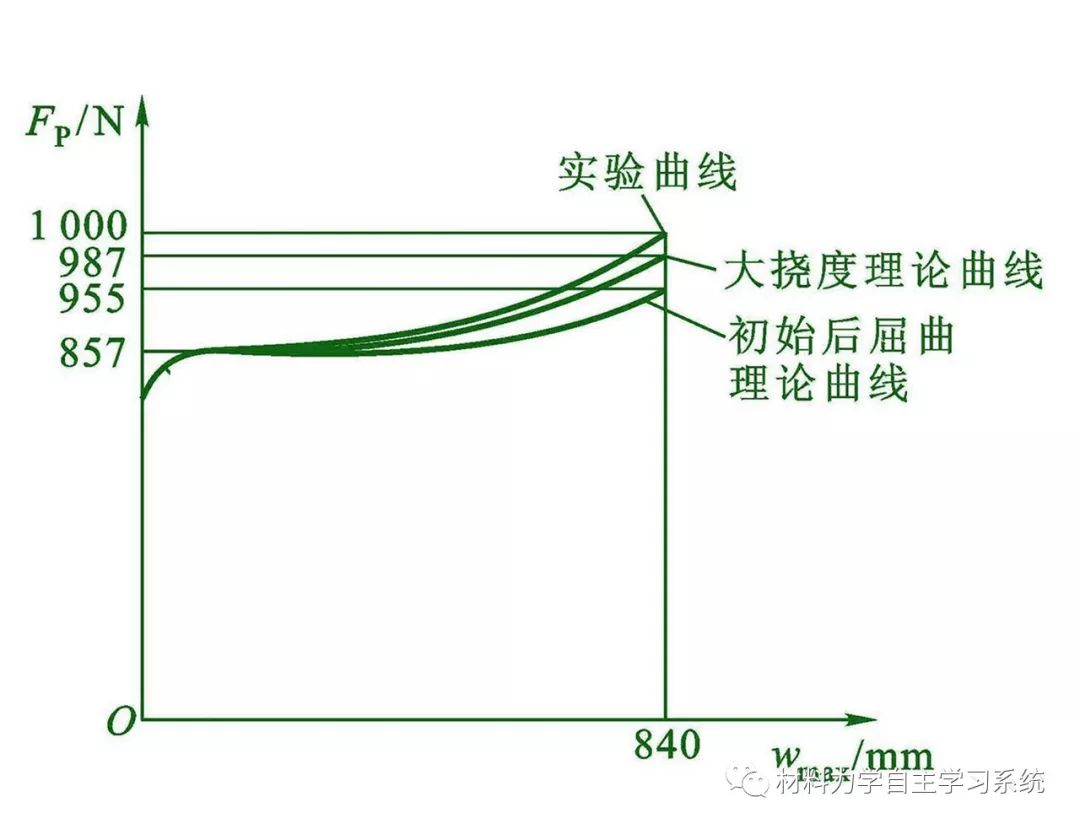
实验过程中,将所施加载荷及与之对应的屈曲侧向位移值,通过绘图仪绘制出屈曲前和屈曲后的全部平衡路径,即“载荷-屈曲位移”曲线。图d所示为d=18mm、l=2 773mm的大柔度压杆的“载荷-屈曲位移” 实验曲线。
根据大挠度理论、初始后屈曲理论与实验分析的结果,可以得到下列重要结论:
1.当FP<FPcr时,压杆的平衡状态不完全是直线的。这是因为实验试样并不是理想直杆,而是具有微小的初始曲率。
2.线性与非线性理论所得到的关于临界载荷大小的结论与实验结果相吻合。
3.大挠度理论、初始后屈曲理论以及实验结果都表明,轴向压力超过临界载荷之后,大柔度压杆发生屈曲,屈曲后的平衡路径是稳定的。这与线性理论所得到的结果是完全不同的。
4.由于超过临界点以后的平衡路径也是稳定的,所以,临界点以后结构仍然具有承载能力。
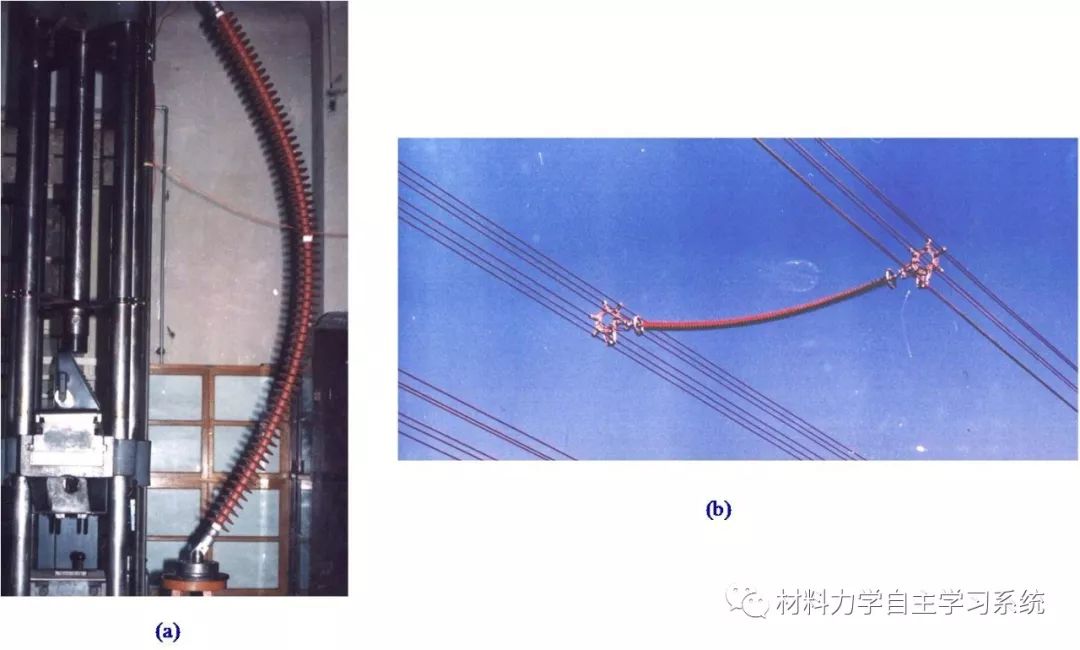
这一结论对于某些工程具有重要意义。上图a所示为我国紧凑型超高压输电线路,为防止两相导线相互接近而设计的“相间绝缘间隔棒”的实验图片,其芯棒为玻璃纤维增强复合材料。图b所示为实际线路上的相间绝缘间隔棒。
两端铰支压杆的临界载荷欧拉公式
为简化分析,并且为了得到可应用于工程的、简明的表达式。在确定压杆的临界载荷时作如下简化:
1.剪切变形的影响可以忽略不计。
2.不考虑杆的轴向变形。
从前面所示的平衡路径图形可以看出,当Δ→0时FP→FPcr。这表明,当FP无限接近分叉载荷FPcr时,在直线平衡构形附近无穷小的邻域内,存在微弯的平衡构形。根据这一平衡构形,由平衡条件和小挠度微分方程,以及端部约束条件,即可确定临界载荷。
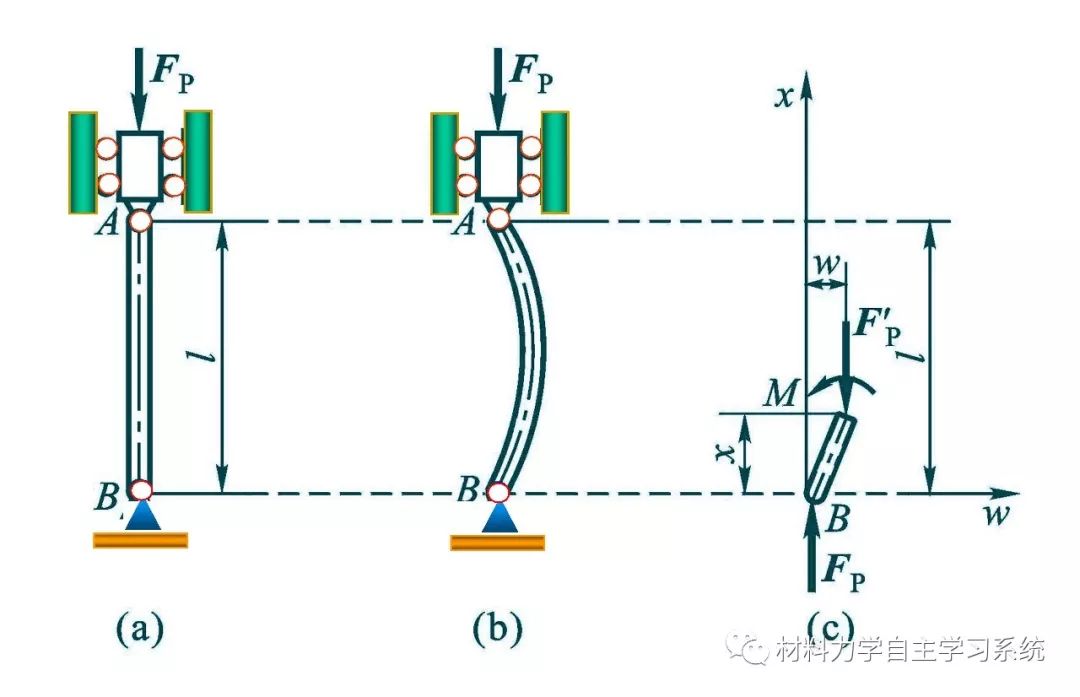
考察上图a所示两端铰支、承受轴向压缩载荷的理想直杆,由图b所示与直线平衡构形无限接近的微弯构形局部(图c)的平衡条件,得到任意截面(位置坐标为x)上的弯矩为

(a)
根据小挠度微分方程
(b)
得到
这是压杆在微弯状态下的平衡微分方程,是确定临界载荷的主要依据,其中
上述微分方程的通解是

对于两端铰支的压杆,利用两端的位移边界条件:

得到:
(c )
方程组(c)中, A、B不全为零的条件是
(d)
由此解得
于是,有

将
代入
即可得到所要求的临界载荷的表达式
这一表达式称为欧拉公式。
当欧拉公式中n=1时,所得到的就是具有实际意义的、最小的临界载荷:
上述二式中,E为压杆材料的弹性模量;I为压杆横截面的形心主惯性矩:如果两端在各个方向上的约束都相同, I则为压杆横截面的最小形心主惯性矩。
从式(c)中的第1式解出B=0,连同
一起代入

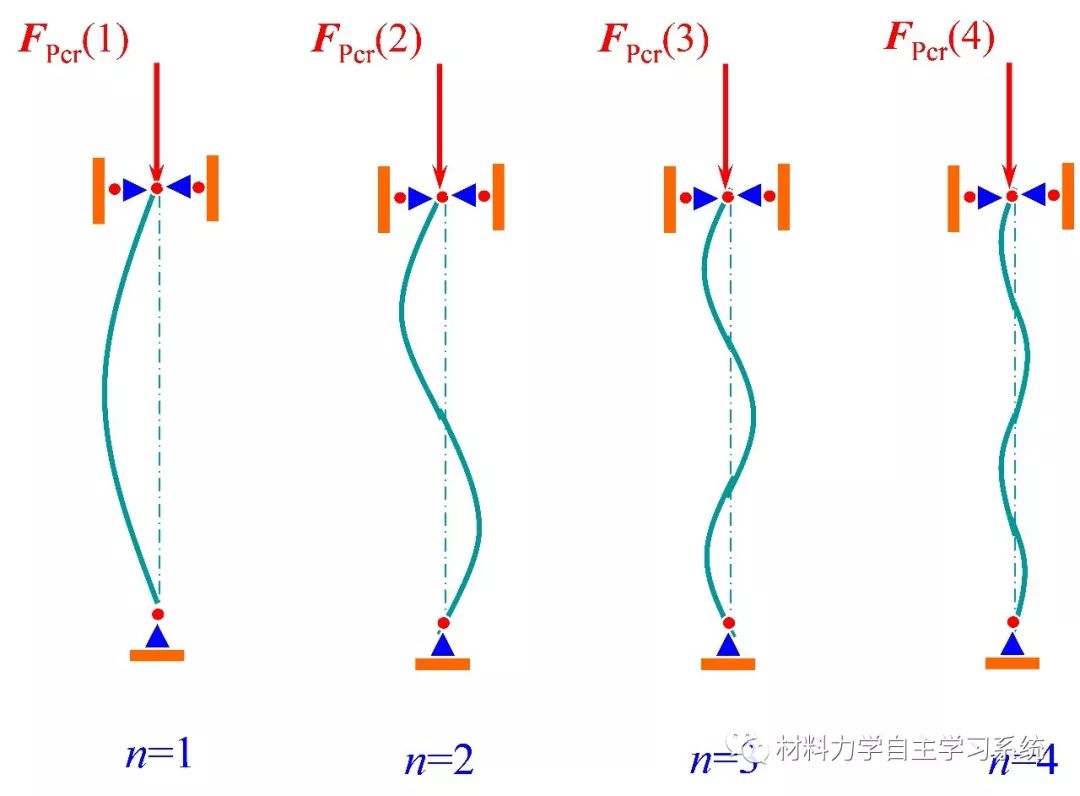
得到与直线平衡构形无限接近的屈曲位移函数,又称为屈曲模态(bucklingmode):
其中,A为不定常数,称为屈曲模态幅值(amplitudeof buckling mode);n为屈曲模态的正弦半波数。下图中所示分别为两端铰支细长压杆1-4阶的屈曲模态。
式
表明,与直线平衡构形无限接近的微弯屈曲位移是不确定的,这与一开始所假定的任意微弯屈曲构形是一致的。
不同刚性支承对压杆临界载荷的影响
不同刚性支承条件下的压杆,由静力学平衡方法得到的平衡微分方程和边界条件都可能各不相同,临界载荷的表达式亦因此而异,但基本分析方法和分析过程却是相同的。对于细长杆,这些公式可以写成通用形式:
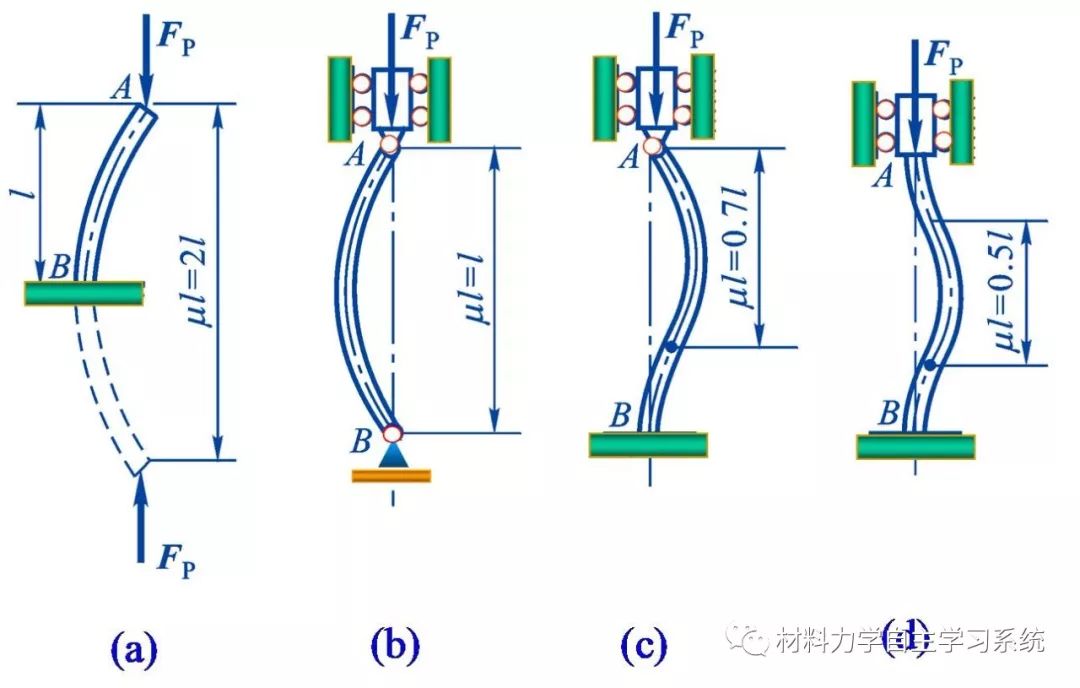
其中,ml为不同压杆屈曲后挠曲线上正弦半波的长度(上图),称为有效长度(effective length);m为反映不同支承影响的系数,称为长度系数(coefficient of 1ength),可由屈曲后的正弦半波长度与两端铰支压杆初始屈曲时的正弦半波长度的比值确定。
例如,两端铰支的压杆的屈曲波形为一个正弦半波(图b),故长度系数m=1。
一端固定另一端自由的压杆,其微弯屈曲波形如图a所示,屈曲波形的正弦半波长度等于2l。这表明,一端固定、另一端自由、杆长为l的压杆,其临界载荷相当于两端铰支、杆长为2l压杆的临界载荷。所以长度系数m=2。
又如,图c中所示一端铰支、另一端固定压杆的屈曲波形,其正弦半波长度等于0.7l,因而,临界载荷与两端铰支、长度为m=0.7l的压杆相同。
再如,图d中所示两端固定压杆的屈曲波形,其正弦半波长度等于0.5l,因而,长度系数m=0.5l。
需要注意的是,上述临界载荷公式,只有在压杆的微弯屈曲状态下仍然处于弹性状态时才是成立的。



