
提示:点击上方"广东电力"↑关注我们,精彩不容错过!
精品文章推荐理由
针对复杂的输电线路环境,研制了一种能够在输电线路上行走的螺栓紧固带电作业机器人及其自提升上线装置,旨在解决输电线路带电作业危险、复杂和繁重等问题。对螺栓松动引起的发热问题,利用设计的机器人样机进行了螺栓紧固作业的试验验证,结果表明:该机器人可在无人登塔的情况下准确完成螺栓的识别定位、对准控制及紧固等作业,有效提高了带电作业的效率。
文章发表在《广东电力》2019年9期“新一代人工智能在电力系统的应用”专刊。欢迎广大读者阅读。

扫二维码,免费阅读全文
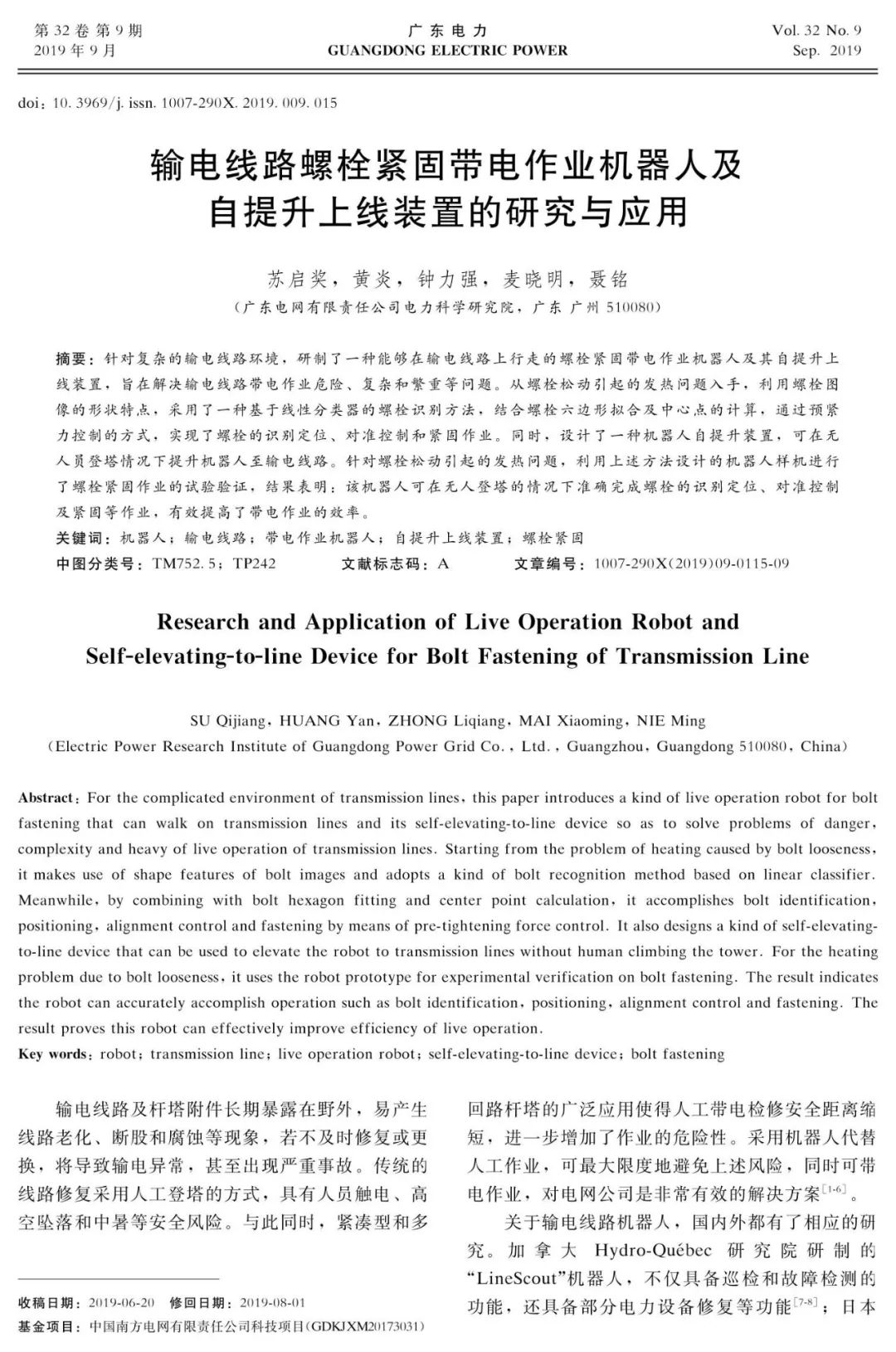
输电线路螺栓紧固带电作业机器人及自提升上线装置的研究与应用
苏启奖,黄炎,钟力强,麦晓明,聂铭
(广东电网有限责任公司电力科学研究院)
摘 要:针对复杂的输电线路环境,研制了一种能够在输电线路上行走的螺栓紧固带电作业机器人及其自提升上线装置,旨在解决输电线路带电作业危险、复杂和繁重等问题。从螺栓松动引起的发热问题入手,利用螺栓图像的形状特点,采用了一种基于线性分类器的螺栓识别方法,结合螺栓六边形拟合及中心点的计算,通过预紧力控制的方式,实现了螺栓的识别定位、对准控制和紧固作业。同时,设计了一种机器人自提升装置,可在无人员登塔情况下提升机器人至输电线路。针对螺栓松动引起的发热问题,利用上述方法设计的机器人样机进行了螺栓紧固作业的试验验证,结果表明:该机器人可在无人登塔的情况下准确完成螺栓的识别定位、对准控制及紧固等作业,有效提高了带电作业的效率。
基金项目:中国南方电网有限责任公司科技项目
作者简介:
苏启奖(1988),男,福建三明人,助理工程师,工学硕士,主要研究方向为电力机器人技术与应用,E-mail:260230871@qq.com。
黄炎(1991),男,湖北武汉人,工程师,工程硕士,主要研究方向为电力机器人技术与应用、图像智能识别,E-mail:huangyan_dky@163.com。
钟力强(1984),男,广东广州人,高级工程师,工学博士,主要研究方向为电力机器人技术与应用,E-mail:zhongliqiang@gddky.csg.cn。
引文信息
★ 苏启奖,黄炎,钟力强,等. 输电线路螺栓紧固带电作业机器人及自提升上线装置的研究与应用[J]. 广东电力,2019,32(9):115-123.
SU Qijiang, HUANG Yan, ZHONG Liqiang, et al. Research and Application of Live Operation Robot and Self-elevating-to-line Device for Bolt Fastening of Transmission Line[J]. Guangdong Electric Power,2019,32(9):115-123.
研 究 背 景
输电线路及杆塔附件长期暴露在野外,易产生线路老化、断股和腐蚀等现象,若不及时修复或更换,将导致输电异常,甚至出现严重事故。传统的线路修复采用人工登塔的方式,具有人员触电、高空坠落和中暑等安全风险。与此同时,紧凑型和多回路杆塔的广泛应用使得人工带电检修安全距离缩短,进一步增加了作业的危险性。采用机器人代替人工作业,可最大限度地避免上述风险,同时可带电作业,对电网公司是非常有效的解决方案。
存 在 问 题
关于输电线路机器人,国内外都有了相应的研究。加拿大Hydro-Québec研究院研制的“LineScout”机器人,不仅具备巡检和故障检测的功能,还具备部分电力设备修复等功能;日本HiBot公司、关西电力公司和东京工业大学研制的“Expliner”机器人,具备行走越障的功能,可用于765 kV以上电压等级输电线路的巡检;美国电力研究院研制的“TI”机器人,具备自动巡视和检测等功能,可用于超高压等级线路的巡检;中科院、国网湖南带电作业中心、武汉大学和上海大学对于输电线路机器人也有丰富的研究,主要集中在110 kV及以上电压等级输电线路巡检、除冰和带电作业机器人方面。因此,当前关于输电线路机器人的研究主要集中在输电线路的巡视和除冰等功能上,重点实现机器人在输电线路上行走、越障、除冰和巡检等功能,通常较少涉及带电作业。受线路晃动和环境的影响,当前带电作业机器人难以按照既定任务精准完成作业。与此同时,当前输电线路机器人的解决方案中,仍然需要人工登塔,再将机器人安装在线路上,实现过程相对复杂。
本文研究内容
针对上述难题,本文提出了一种输电线路带电作业机器人及其自提升上线装置作为解决方案,对机器人结构及其控制系统、螺栓的识别与紧固作业、自提升上线装置等关键应用问题进行研究,并进行了相应的试验。根据该方案研制的样机,搭配螺栓紧固作业末端,在无人员登塔的情况下,利用自提升上线装置,可自主完成螺栓紧固等带电作业,有效解决因螺栓松动引起的输电线路引流板发热等问题。
广东电力》文章免费获取方法
1、手机阅读。识别下面二维码,免下载APP,免费获取全文。
2、中国知网(优先出版)、万方数据、重庆维普等国内数据库均可以搜索下载。
3、我刊作者QQ群文件:681399883、478017233
4、可向编辑部索取本期完整电子版,发邮件至gddl_01@163.com免费获取。
5、可向编辑部索取纸质期刊,发邮件或在本文后留言,告知邮寄地址,我刊将免费赠送纸质版期刊。

电 话:020-85125659(投稿、发行)
020-87304801(广告)
020-87304855(订阅)
邮 箱:gddl_01@163.com
网 址:gddl.gddky.csg.cn
微信号:gddl1988
作者QQ群:681399883
专家QQ群:669705506

长按二维码关注
↓↓↓嘿,等你点个赞↓↓↓


