
提示:点击上方"广东电力"↑关注我们,精彩不容错过!
精品文章推荐理由
为提高输电线路通道内树障清理的安全性与作业效率,设计了一种悬挂刀具结构的树障清理空中机器人。该机器人在空中能够实现稳定作业,验证了树障清理空中机器人工程应用的可行性和有效性。
文章发表在《广东电力》2019年9期“新一代人工智能在电力系统的应用”专刊。欢迎广大读者阅读。

扫二维码,免费阅读全文
悬挂刀具结构的树障清理空中机器人设计
许昌亮1,张秋雁2,杨忠1,姜遇红3,徐浩1
(1.南京航空航天大学 自动化学院;
2.贵州电网有限责任公司电力科学研究院;
3.南京航空航天大学 无人机研究院)
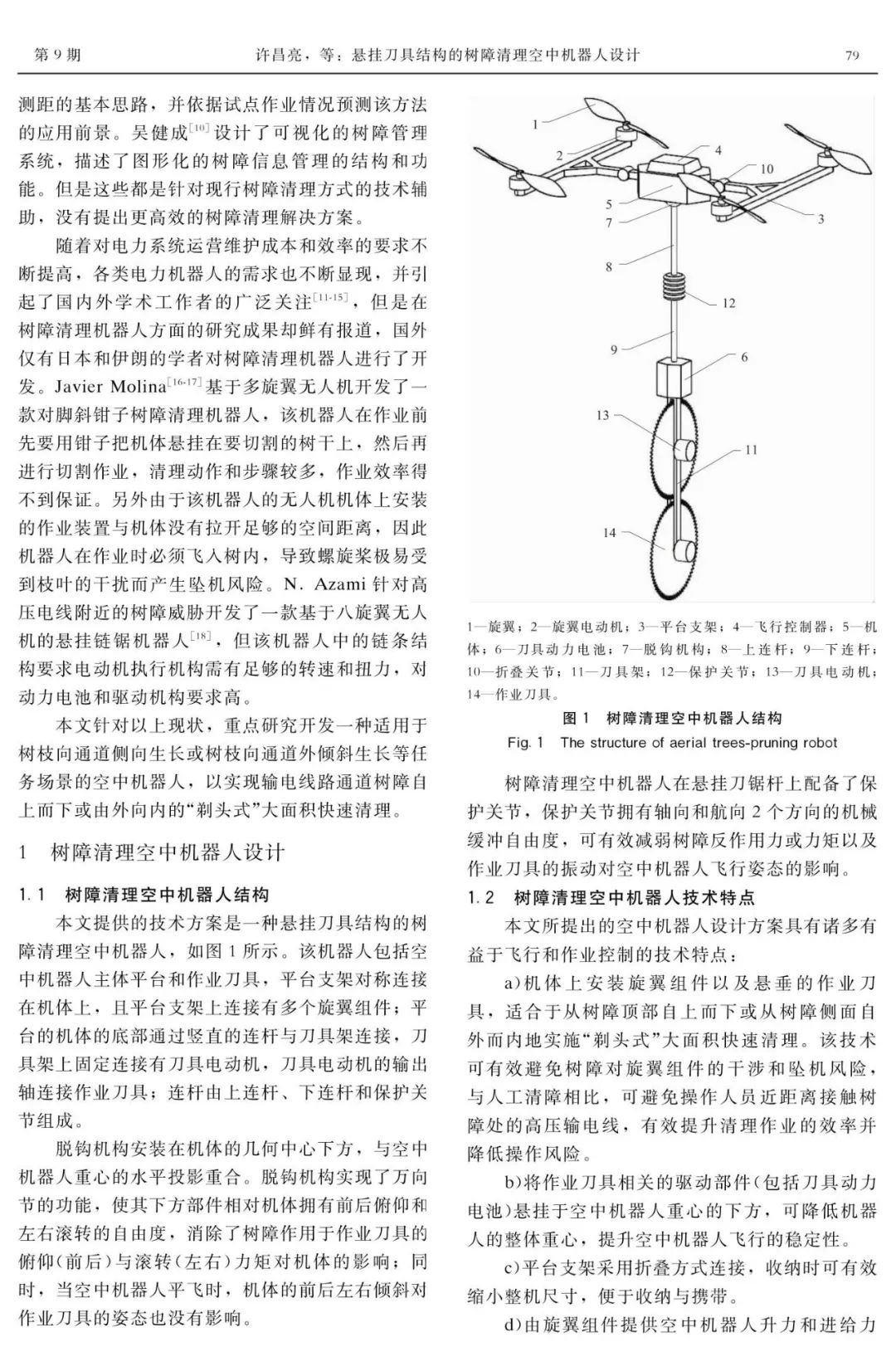
摘 要:为提高输电线路通道内树障清理的安全性与作业效率,设计了一种悬挂刀具结构的树障清理空中机器人。该机器人通过在机体上安装旋翼组件以及悬垂的作业刀具,适合于自上而下或由外向内对树障实施“剃头式”大面积快速清理,可有效保证操作人员与树障处高压输电线的安全距离,提升了清障作业的效率并降低操作风险。树障清理空中机器人建模与仿真证明,该机器人在空中能够实现稳定作业,验证了树障清理空中机器人工程应用的可行性和有效性。
基金项目:国家自然科学基金项目;中国南方电网有限责任公司科技项目
作者简介:
许昌亮(1990),男,江苏宿迁人,在读博士研究生,主要从事机器人建模与控制研究,E-mail: xuchangliang@nuaa.edu.cn。
张秋雁(1965),男,贵州习水人,教授级高级工程师,工学学士,主要从事测控技术研究,E-mail:1072710113@qq.com。
杨忠(1969),男,江苏南京人,教授,工学博士,主要从事智能机器人及飞行器的设计与控制研究,E-mail: YangZhong@nuaa.edu.cn。
引文信息
★ 许昌亮,张秋雁,杨忠,等. 悬挂刀具结构的树障清理空中机器人设计[J]. 广东电力,2019,32(9):78-84.
XU Changliang,ZHANG Qiuyan,YANG Zhong,et al. Design of Aerial Trees-pruning Robot with Hanging Saws Structure[J]. Guangdong Electric Power,2019,32(9):78-84.
研 究 背 景
树障是输电线路通道普遍存在的一种安全隐患,因树障造成输电线路短路或绝缘下降从而引发的安全事故时有发生。为此,各级电力部门每年都要投入大量的人力、物力与财力对辖区内输电线路通道的树障进行清理整治。目前树障清理主要依赖于人工清理,存在着效率不高、安全风险大等缺点,尤其是地形恶劣和复杂的环境给树障清理工作带来了巨大的挑战。树障清理成为电网企业一直想要解决的紧迫问题,亟需一种自动清理装置来解决目前相对落后的人工作业方式。
存 在 问 题
有关树障清理方面的报道和研究不多,目前的报道和文献显示几乎所有输电线路的树障清理工作都是由人工辅以简单的作业工具来完成的。也有一些树障清理设备的结构设计和输电线路树障测量方法的探讨。张学东针对输电线路树障砍伐采用人工爬树绕绳清理效率低的问题,设计了输电线路树障砍伐绕线装置。郑耀华提出利用激光测距技术、H.264视频解压缩技术和混合无线通信组网技术组成架空输电线路走廊树障在线监测系统,来降低架空输电线路走廊内树木生长引起的线路跳闸故障率,减轻线路维护人员巡线工作强度。毛强提出基于机载激光雷达的输电线路树障智能测距的基本思路,并依据试点作业情况预测该方法的应用前景。吴健成设计了可视化的树障管理系统,描述了图形化的树障信息管理的结构和功能。但是这些都是针对现行树障清理方式的技术辅助,没有提出更高效的树障清理解决方案。
随着对电力系统运营维护成本和效率的要求不断提高,各类电力机器人的需求也不断显现,并引起了国内外学术工作者的广泛关注,但是在树障清理机器人方面的研究成果却鲜有报道,国外仅有日本和伊朗的学者对树障清理机器人进行了开发。Javier Molina基于多旋翼无人机开发了一款对脚斜钳子树障清理机器人,该机器人在作业前先要用钳子把机体悬挂在要切割的树干上,然后再进行切割作业,清理动作和步骤较多,作业效率得不到保证。另外由于该机器人的无人机机体上安装的作业装置与机体没有拉开足够的空间距离,因此机器人在作业时必须飞入树内,导致螺旋桨极易受到枝叶的干扰而产生坠机风险。N. Azami针对高压电线附近的树障威胁开发了一款基于八旋翼无人机的悬挂链锯机器人,但该机器人中的链条结构要求电动机执行机构需有足够的转速和扭力,对动力电池和驱动机构要求高。
本文研究内容
本文针对以上现状,重点研究开发一种适用于树枝向通道侧向生长或树枝向通道外倾斜生长等任务场景的空中机器人,以实现输电线路通道树障自上而下或由外向内的“剃头式”大面积快速清理。


《广东电力》文章免费获取方法
1、手机阅读。识别下面二维码,免下载APP,免费获取全文。
2、中国知网(优先出版)、万方数据、重庆维普等国内数据库均可以搜索下载。
3、我刊作者QQ群文件:681399883、478017233
4、可向编辑部索取本期完整电子版,发邮件至gddl_01@163.com免费获取。
5、可向编辑部索取纸质期刊,发邮件或在本文后留言,告知邮寄地址,我刊将免费赠送纸质版期刊。

电 话:020-85125659(投稿、发行)
020-87304801(广告)
020-87304855(订阅)
邮 箱:gddl_01@163.com
网 址:gddl.gddky.csg.cn
微信号:gddl1988
作者QQ群:681399883
专家QQ群:669705506

长按二维码关注
↓↓↓嘿,等你点个赞↓↓↓


