
![]()

科学辅导机构
![]()


《WER-2019总决赛》方案视频扬中创客教育出品

《人工智能》三:放置芯片1
课程简介
附
加
任
务
总
汇
总

以培养学生动手、动脑能力、开发学生智力为宗旨;以《人工智能等级测评》为平台;以口袋课堂为教学模式;以推动科教为目的的新形式课堂!
《WER-2019普及赛》由4个预设任务+3个附加任务组成!
《WER-2019普及赛》附加任务解决方案,由18--20个比较具有代表性的任务组成,通过任务完成视频,直观、形象地给出解决方案!
本系列附加任务方案,全部自主研发,及具有代表性,对以后参加比赛任务的设计,具有极大的指导作用!从而在赛场上取得优异的成绩。
本教程为WER比赛任务设计高级教程,可以帮助同学们备战各类比赛中的WER相关机器人比赛项目。
此教程适合0基础的初学者和具有一定WER机器人搭建基础知识的参赛学生学习!
1
课程内容
常见方案剖析
1、任务执行机构设计搭建基本原则;
2、积木普及赛任务常见动作;
3、积木赛真题方案;
本系列附加任务方案,全部自主研发,及具有代表性,对以后参加比赛任务的设计,具有极大的指导作用!从而在赛场上取得优异的成绩。风,毫无预兆地席卷整片旷野,撩动人的思绪万千。
1
机构设计搭建基本原则
01
尽可能的简化动作
尽可能的简化动作:
首先思考自己能实现的解决办法,再做分步动作设计,动作步数尽可能少,借助最近的参考点或限位点实现精准的动作。
02
执行结构简洁牢固
执行结构简洁牢固:
为了实现动作要求而设计执行机构,每一个增加的零件都应思考它到底有没有作用,走位和动作的精准度往往比复杂的机构设计来的管用。
03
需要精确走位的要安装限位机构
需要精确走位的要安装地面限位机构:
地面限位主要目的是解决巡线后车身不能准确对齐任务目标,可以专门训练各种长度限位的搭建方案。
04
需要精确走位的要安装限位机构
2
积木普及赛任务常见动作
01
一、基本动作:
基本动作:推(顶)、拉(勾)、拨、转、投(放)
1、“推”、“拉”两个动作可以仅靠小车走位来实现;
2、“拨”动作比较常见,常见的都可以用小车旋转来实现,上下方向拨动的可以用闭环电机实现;
3、“转”的大多数需要准确的轴心;
4、“投”、“放”动作一般需要电机辅助,需要注意的是力臂的上下限位和被投放任务道具的装载机构,对动作精度要求较低的可以取消启动马达的闭环选项来达到较准确的角度控制;
02
二、高难度动作:
高难度动作:抬(撬)、夹(抱)
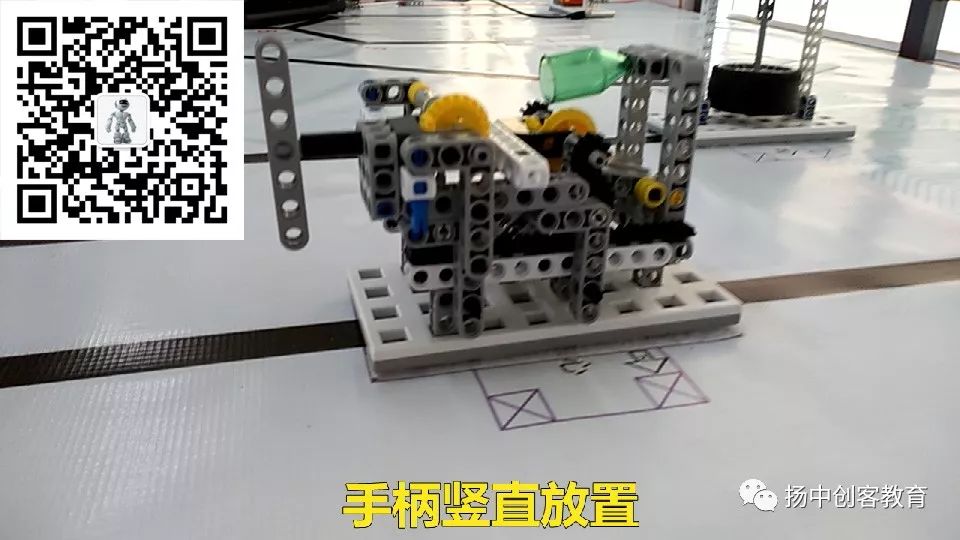
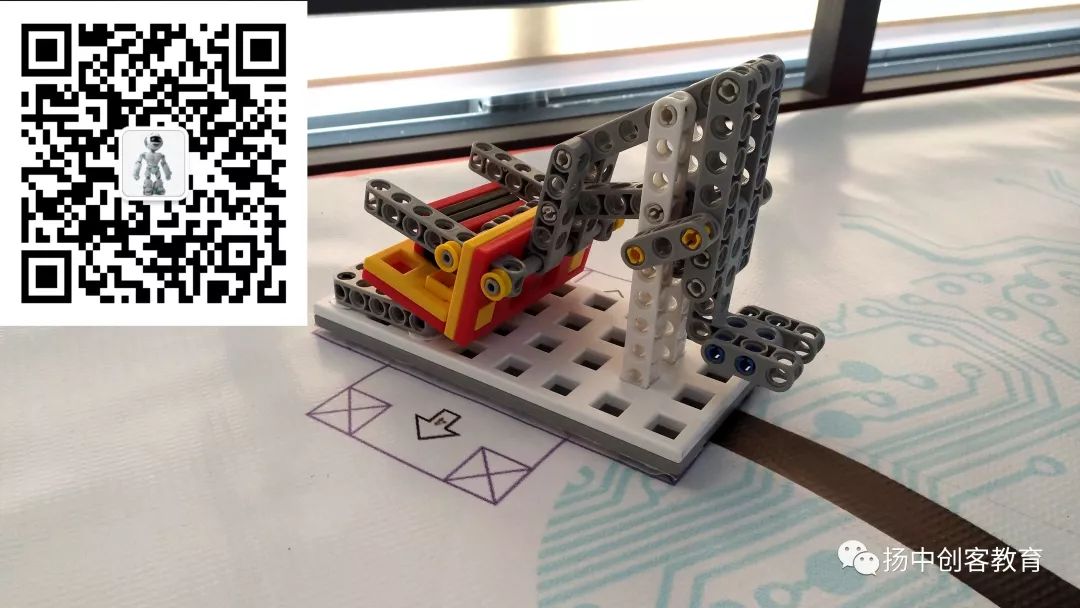
1、“抬”动作的作用力一般是固定方向,比如往上或斜上方,直接使用闭环电机+直梁的方式做出的。圆弧形运动方向往往会出现问题,可以通过曲柄连杆结构或者四边形结构来实现。如果有对移动位置有超高要求的类似叉车的升举动作,可以通过小车配合运动来实现精确控制(不建议使用齿条等结构过于复杂的方式)。参考视频抬杠;
2、“夹”、“抱”动作,对外设设计要求比较高,我们通过巧妙的设计机械手,把复杂的任务简单化,从而达到任务的简便化。
通过以上各种情况,认真进行实际训练,让学生熟练地拼装外设,设计方案,完成任务,从而达到赛场游刃有余,本系列教程,根据以上分类,逐个和大家分享。
3
WER-2019年总决赛方案
1
方案特点
全方位,完美方案~!
1、全方位:
此方案包含比赛全部可能出现的位置和方向;
2、完美方案:
巡线是基础;
方案是关键;
程序是保障;
外设是灵魂;
本方案通过精巧的外设,精准的巡线程序,达到完美方案效果~!
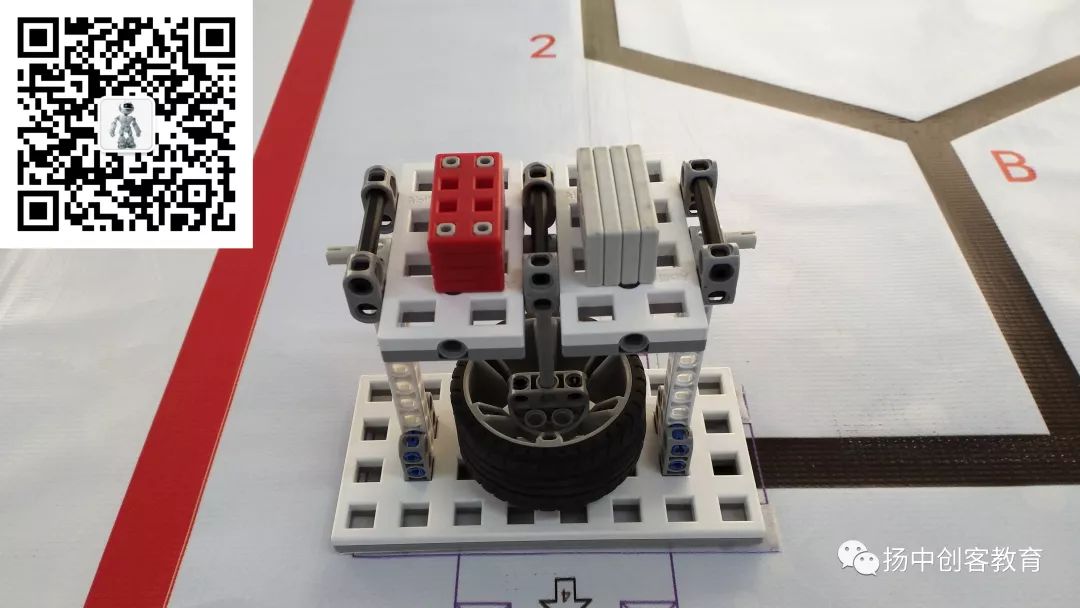
本方案全部使用六面平板搭建机器和外设~!
扬中创客教育出品

![]()
![]()
学习基金,成就学习精英!
![]()
视
频
课
程
《微课堂》
《WER-2019人工智能》决赛方案
三:放置芯片

长按二维码,学习视频课程
![]()
扬中创客教育出品
![]()
![]()
wei
微
ke
课
tang
堂
![]()
《WER-2019人工智能》总决赛方案之一:深度学习!
《WER-2019人工智能》总决赛方案之二:能源核心!
《WER-2019人工智能》总决赛方案之三:放置芯片!
《WER-2019人工智能》总决赛方案之四:智能分拣!

《WER-2019人工智能》总决赛方案:机器、外设搭建视频!


End
扬中创客教育扫描关注
查看其他文章
![]()



